Abstract parent class of all force components. More...
#include <ForceComponent.h>
Public Member Functions | |
| ForceComponent (const char *name, ForceComponentSettings *forceComponentSettings) | |
| Construct ForceComponent. | |
| const char * | getName () |
| Returns force component name. | |
| bool | isInitialising () |
| Returns true if the force component is being initialised. | |
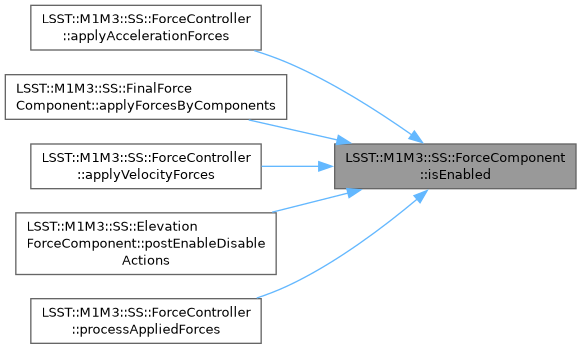
| bool | isEnabled () |
| Returns true if the force component is enabled. | |
| bool | isDisabling () |
| Returns true if the force component is being disabled. | |
| bool | isActive () |
| Returns true if the force compoment is active - shall be calculated. | |
| void | enable () |
| Enable the force component. | |
| void | disable () |
| Disable the force component. | |
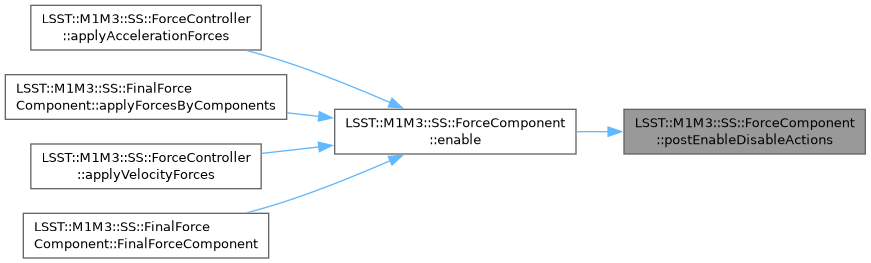
| virtual void | postEnableDisableActions ()=0 |
| Called after enable/disable changes. | |
| void | update () |
| void | reset () |
Protected Member Functions | |
| virtual void | postUpdateActions ()=0 |
| Called after update to forces. | |
Detailed Description
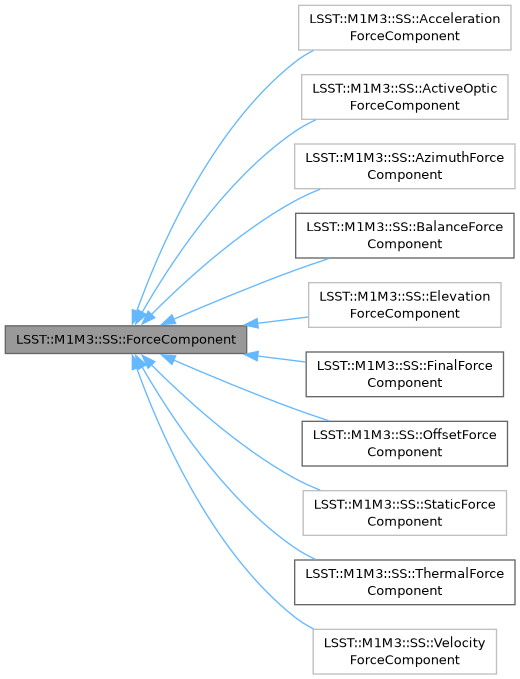
Abstract parent class of all force components.
Forces acting on mirror are calculated as sum of 6 scalar forces (lateral forces in x,y and z direction and rotational forces (moments) around x,y and z axis). Individual actuators forces are summed in FinalForceComponent. Considered forces and demands are:
- AccelerationForceComponent
- ActiveOpticForceComponent (Z direction only)
- AzimuthForceComponent
- BalanceForceComponent
- ElevationForceComponent
- OffsetForceComponent
- StaticForceComponent
- ThermalForceComponent
- VelocityForceComponent
Force component can be enabled or disabled. When it is disabled, its contribution is scaled linearly to zero to prevent overstressing the mirror. Commanding of the enabled/disabled states and checking if the forces are enabled before being applied is performed in the ForceController class.
Constructor & Destructor Documentation
◆ ForceComponent()
| LSST::M1M3::SS::ForceComponent::ForceComponent | ( | const char * | name, |
| ForceComponentSettings * | forceComponentSettings ) |
Construct ForceComponent.
- Parameters
-
name force component name forceComponentSettings
Member Function Documentation
◆ disable()
| void LSST::M1M3::SS::ForceComponent::disable | ( | ) |
Disable the force component.
Starts to gradually scales force contribution to
◆ getName()
|
inline |
Returns force component name.
- Returns
- force component name
◆ isActive()
|
inline |
Returns true if the force compoment is active - shall be calculated.
- Returns
- true if the force component is either enabled or disabling (scaling back to 0)
◆ isDisabling()
|
inline |
Returns true if the force component is being disabled.
- Returns
- true if the force component is being disabled
◆ isEnabled()
|
inline |
Returns true if the force component is enabled.
- Returns
- true if the force component is enabled
◆ isInitialising()
|
inline |
Returns true if the force component is being initialised.
- Returns
- true if the force component is being initialised
◆ postEnableDisableActions()
|
pure virtual |
Called after enable/disable changes.
Publish a state change for the component Pure virtual, needs to be overriden in children.
Implemented in LSST::M1M3::SS::AccelerationForceComponent, LSST::M1M3::SS::ActiveOpticForceComponent, LSST::M1M3::SS::AzimuthForceComponent, LSST::M1M3::SS::BalanceForceComponent, LSST::M1M3::SS::ElevationForceComponent, LSST::M1M3::SS::FinalForceComponent, LSST::M1M3::SS::OffsetForceComponent, LSST::M1M3::SS::StaticForceComponent, LSST::M1M3::SS::ThermalForceComponent, and LSST::M1M3::SS::VelocityForceComponent.
◆ postUpdateActions()
|
protectedpure virtual |
Called after update to forces.
Check for forces that need to be clipped. Update SAL. Pure virtual, needs to be overriden in children.
Implemented in LSST::M1M3::SS::AccelerationForceComponent, LSST::M1M3::SS::ActiveOpticForceComponent, LSST::M1M3::SS::AzimuthForceComponent, LSST::M1M3::SS::BalanceForceComponent, LSST::M1M3::SS::ElevationForceComponent, LSST::M1M3::SS::FinalForceComponent, LSST::M1M3::SS::OffsetForceComponent, LSST::M1M3::SS::StaticForceComponent, LSST::M1M3::SS::ThermalForceComponent, and LSST::M1M3::SS::VelocityForceComponent.
The documentation for this class was generated from the following files:
- ForceComponents/ForceComponent.h
- ForceComponents/ForceComponent.cpp